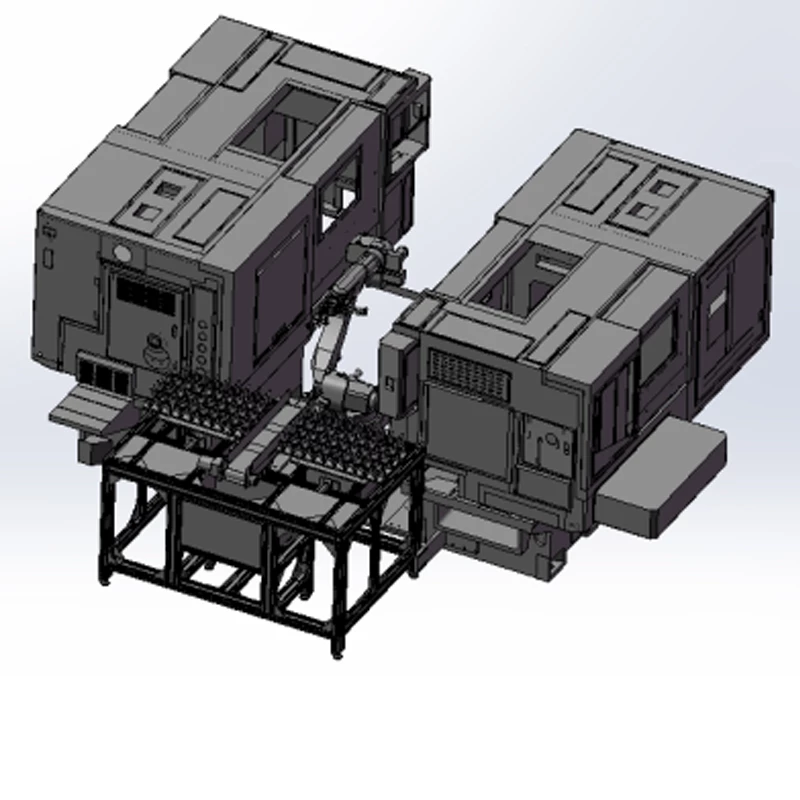
CNC Lathe et six bras robotiques conjoints pour le chargement et le déchargement
|
Six-paramètres du robot axe |
||||
|
champ d'application |
Toute forme de travail de travail soi-Situé par des caractéristiques de forme d'artefacts. |
|||
|
La vinaigrette courir-dehors |
10 secondes |
Total unique courir-dehors |
PRoduTemps de coupe CT + 10 secondes |
|
|
Mode d'entraînement |
Entraînement de cylindre standard |
mode de localisation |
Positionnement du dispositif de positionnement secondaire |
|
|
Précision de positionnement de la pièce |
±0,03 |
Système de contrôle |
Domestique/Wistron/jetourmenter/ Bousculer |
|
|
Plateau de pièce |
Matériel: plaque en aluminium, spécification: 660 * 340 * 15, quantité: 2 pièces |
|||
|
PtigeLe remplacement de l'UCT doit changer la pièce |
Panneau et patte |
|||
|
Ccaractéristique |
Six-robot axe + CNC Lathe + bac à matrice de points, s'adapter au ptigeL'UCT doit avoir un certain lot, peut-il une séquence de deux séquences de séquences de tour de fil de virage. |
|||
|
Des conditions électriques sontnécessaires |
Alimentation: 3-phase quatre-fil 380V; Plage de fluctuation de tension: ± 10%; Fréquence: 50 Hz; La source de gaz est requise: 0,6 MPa. |
|||
|
Sur-Exigences environnementales du site |
Température ambiante: -10~50°C; Humidité relative: 20%~75%; vibration: accélération des vibrations <0.5g; electrical cabinet must be grounded, grounding resistance<1; pas de gaz corrosifs à la chantier; Fondation sur l'atelier: traitement du plancher du ciment conventionnel. |
|||
Produits connexes
Blog connexe

Comment juger la qualité d'un tour CNC?
La précision d'un tour CNC doit-elle être ajustée?
Quels accessoires sontnécessaires pour un tour CNC?
Est-il difficile de faire fonctionner un tour CNC?
Quelles sont les caractéristiques de la technologie CNC Lathe?

