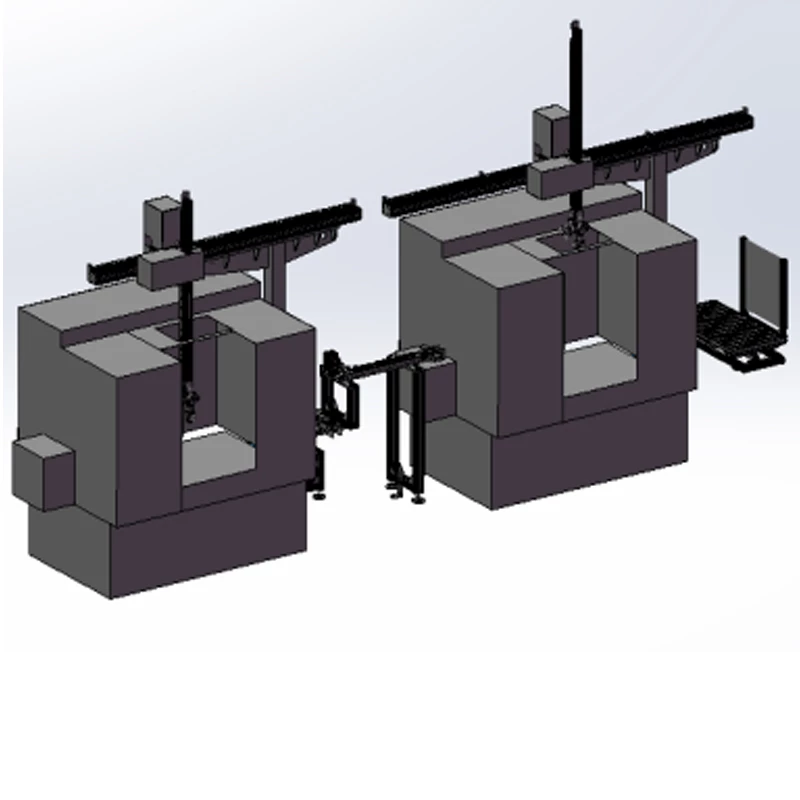
Wire-line truss manipulator
|
Basic parameters of the hopper-type integrated truss manipulator |
||||
|
Scope of application |
Disk type, shaft type workpiece |
|||
|
Reloading run-out |
6 seconds (wire harness 3m / s) |
Total run-out of a single piece |
Product cutting time +6 seconds |
|
|
Storage drive mode |
Speed regulation motor drive |
Location mode |
Sensor detects the positioning |
|
|
Workpiece positioning accuracy |
±0.03 |
Control system |
Domestic/Wistron/Import/ HUST |
|
|
Vibration disc material warehouse |
Motor, cylinder |
|||
|
Product replacement needs to change the part |
Barn limit mechanism adjustment and hand claw |
|||
|
Characteristic |
The mobility is very strong. Integration of manipulator and CNC lathe makes it adapt to the new machine and can be flexible processing after relocation and displacement. |
|||
|
Required electrical conditions |
Power supply: 3-phase four-wire 380V; voltage fluctuation range: ± 10%; frequency: 50 HZ; gas source is required: 0.6 Mpa. |
|||
|
On-site environmental requirements |
Ambient temperature: -10~50°C; relative humidity: 20%~75%; vibration: vibration acceleration <0.5g; electrical cabinet must be grounded, grounding resistance<1; no corrosive gases at the work site; workshop foundation: conventional cement floor treatment. |
|||
Related Products
Related Blog

How to judge the quality of a CNC lathe?
Does the precision of a CNC lathe need to be adjusted?
What accessories are needed for a CNC lathe?
Is it difficult to operate a CNC lathe?
What are the characteristics of CNC lathe technology?

