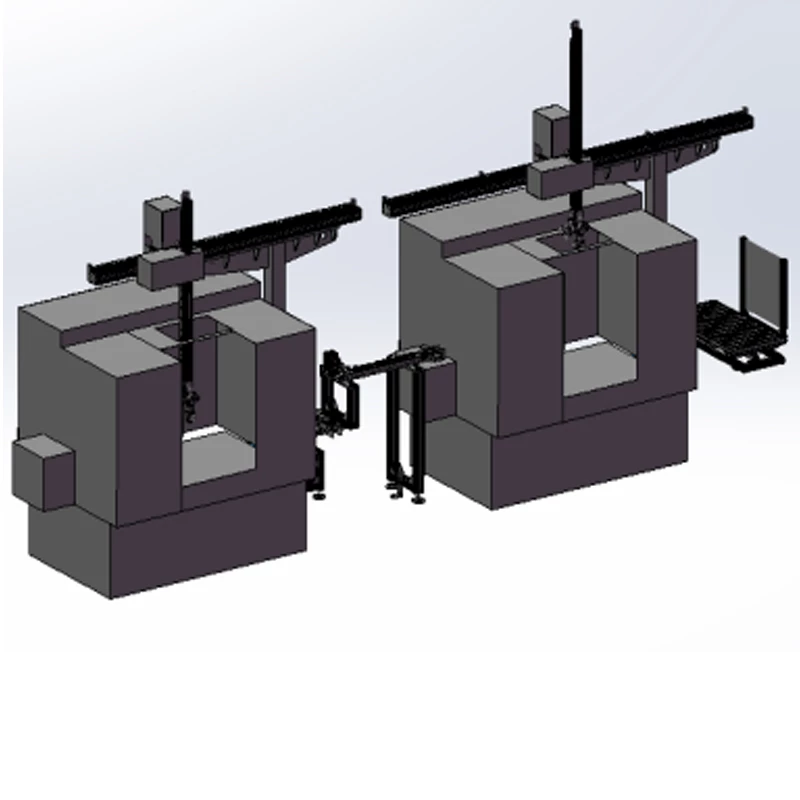
Langa-linja -trussimanipulaattori
|
Hopperin perusparametrit-Kirjoita integroitu ristikkokäsittely |
||||
|
Sselviytyä soveltaminen |
Levytyyppi, akselityyppinen työkappale |
|||
|
Lataus juoksua-ulkona |
6 sekuntia (lankavaljaat 3M / s) |
Totti- juoksua-ulkona yhden kappaleen |
PrypäleCT -leikkausaika +6 sekuntia |
|
|
Storage -tilaa |
Nopeussäätelymoottori |
Lensmoitteetto |
Anturi havaitsee paikannuksen |
|
|
Työkappaleen paikannustarkkuus |
±0,03 |
Hallintajärjestelmä |
Koti-/Wistron/Minämortti/ Hust |
|
|
Värähtelylevymateriaalivarasto |
Moottori, sylinteri |
|||
|
PsauvaUCT:n korvaamisen on muutettava osa |
Navetta raja mekanismin säätö ja käsikynsi |
|||
|
Charakteristinen |
THän liikkuvuus on erittäin vahva. Manipulaattorin ja CNC -sorvin integrointi tehdä sopeutua uuteen koneeseen ja Voi olla joustava käsittely jälkeen r -ja siirtyminen. |
|||
|
Vaadittavat sähköolosuhteet |
Virtalähde: 3-vaiheneljä-lanka 380 V; Jännitteen vaihtelualue: ± 10%; Taajuus: 50 Hz; gKuten lähde vaaditaan: 0,6 MPa. |
|||
|
-Lla-sivuston ympäristövaatimukset |
Ympäristön lämpötila: -10~50°C; Suhteellinen kosteus: 20%~75%; Tärinä: Tärinän kiihtyvyys <0.5g; electrical cabinet must be grounded, grounding resistance<1; Ei syövyttäviä kaasuja työpaikka; Työpajan säätiö: Tavanomainen sementtilattiahoito. |
|||
Edellinen: CNC -sorvi ja kuusi yhteistä robottivarsi lastausta ja purkamista varten
Seuraava: Moottoriventtiili katkaistu kone
Liittyvät tuotteet
Liittyvä blogi

Kuinka arvioida CNC -sorvin laatua?
Onko CNC -sorvin tarkkuus säätää?
Mitä lisävarusteita tarvitaan CNC -sorasan?
Onko CNC -sorvin käyttämistä vaikeaa?
Mitkä ovat CNC -sorvitekniikan ominaisuudet?

