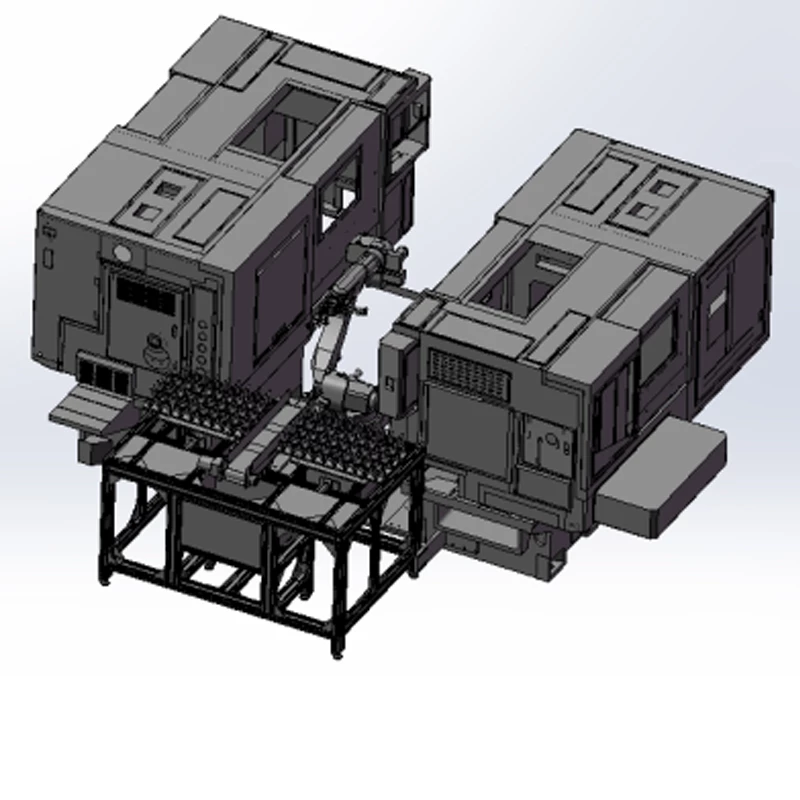
CNC -sorvi ja kuusi yhteistä robottivarsi lastausta ja purkamista varten
|
Kuusi-akselin robotin parametrit |
||||
|
soveltamisala |
Minkä tahansa työkappaleen itse-Sijaitsee Artifact Shape -ominaisuuksilla. |
|||
|
Pukeutuminen juoksua-ulkona |
10 sekuntia |
Yhden kappaleen yhteensä juoksua-ulkona |
PrypäleCT -leikkausaika + 10 sekuntia |
|
|
Storage -tilaa |
Vakiosylinteriasema |
sijaintitila |
Toissijainen paikannuslaitteen sijainti |
|
|
Työkappaleen paikannustarkkuus |
±0,03 |
Hallintajärjestelmä |
Koti-/Wistron/Minämortti/ Hust |
|
|
Työkappale |
Materiaali: alumiinilevy, eritelmä: 660 * 340 * 15, määrä: 2 kappaletta |
|||
|
PsauvaUCT:n korvaamisen on muutettava osa |
Paneeli |
|||
|
Charakteristinen |
Kuusi-akselirobotti + CNC -sorvi + Dot Matrix Bin, sopeudu p: hensauvaUCT: llä on oltava tietty erä, voiko yksi sekvenssi kaksi sekvenssiä automaattinen käännöslangan prosessointi. |
|||
|
Vaaditaan sähköolosuhteet |
Virtalähde: 3-vaiheneljä-lanka 380 V; Jännitteen vaihtelualue: ± 10%; Taajuus: 50 Hz; Kaasulähde vaaditaan: 0,6 MPa. |
|||
|
-Lla-sivuston ympäristövaatimukset |
Ympäristön lämpötila: -10~50°C; Suhteellinen kosteus: 20%~75%; Tärinä: Tärinän kiihtyvyys <0.5g; electrical cabinet must be grounded, grounding resistance<1; Ei syövyttäviä kaasuja työpaikka; Työpajan säätiö: Tavanomainen sementtilattiahoito. |
|||
Edellinen: 12-Station Spacezing Truss -manipulaattori
Seuraava: Moottoriventtiili katkaistu kone
Liittyvät tuotteet
Liittyvä blogi

Kuinka arvioida CNC -sorvin laatua?
Onko CNC -sorvin tarkkuus säätää?
Mitä lisävarusteita tarvitaan CNC -sorasan?
Onko CNC -sorvin käyttämistä vaikeaa?
Mitkä ovat CNC -sorvitekniikan ominaisuudet?

