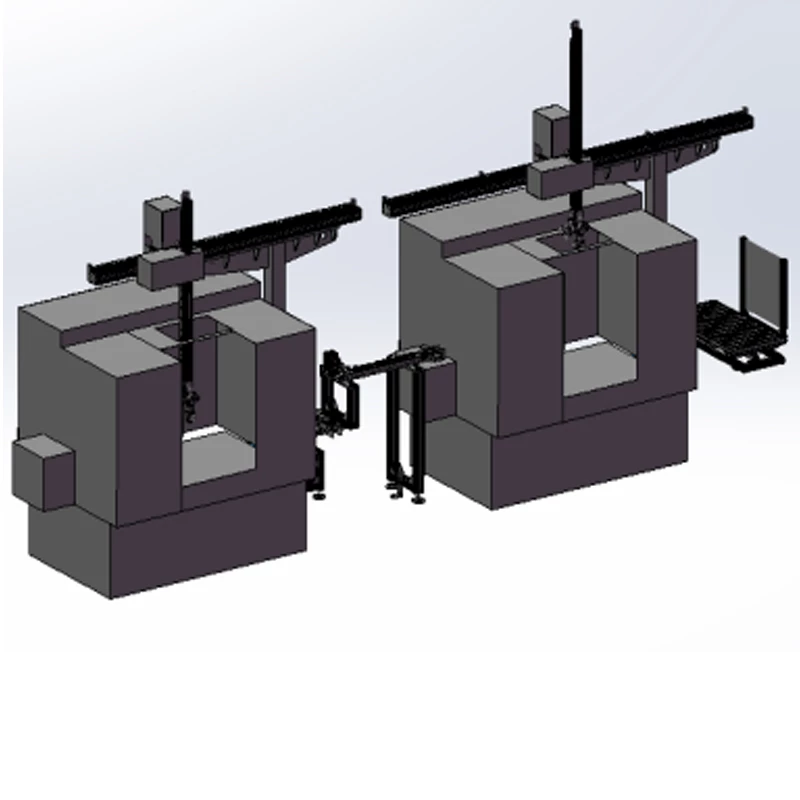
Cable-manipulador de armadura de línea
|
Parámetros básicos de la tolva-Escriba el manipulador de truss integrado |
||||
|
Safrontar de aplicación |
Tipo de disco, pieza de trabajo tipo eje |
|||
|
Recarga correr-afuera |
6 segundos (Arnés de alambre 3m / s) |
Total correr-afuera de una sola pieza |
PAGRoduTiempo de corte de CT +6 segundos |
|
|
Modo de conducción de almacenamiento |
Accionamiento del motor de regulación de velocidad |
Lmodo de ocación |
El sensor detecta el posicionamiento |
|
|
Precisión del posicionamiento de la pieza de trabajo |
±0.03 |
Sistema de control |
Doméstico/Wistron/Import/ Ausencia |
|
|
Almacén de material de disco de vibración |
Motor, cilindro |
|||
|
PAGvaraEl reemplazo de UCT debe cambiar la pieza |
Ajuste del mecanismo de límite de granero y garra de mano |
|||
|
doharacterista |
TLa movilidad es muy fuerte. Integración del manipulador y torno de CNC lo hace adaptarse a lanueva máquina y puede ser un procesamiento flexible después riñonalelcedente y desplazamiento. |
|||
|
Condiciones eléctricas requeridas |
Fuente de alimentación: 3-fase cuatro-cable 380V; Rango de fluctuación de voltaje: ± 10%; Frecuencia: 50 Hz; gramoComo se requiere la fuente: 0.6 MPa. |
|||
|
En-Requisitos ambientales del sitio |
Temperatura ambiente: -10~50°DO; Humedad relativa: 20%~75%; Vibración: aceleración de vibración <0.5g; electrical cabinet must be grounded, grounding resistance<1; sin gases corrosivos en el sitio de trabajo; Fundación del taller: tratamiento de piso de cemento convencional. |
|||
Anterior: Tornos CNC y seis brazos robóticos articulares para cargar y descargar
Próximo: Máquina de corte de válvula de motor
Productos relacionados
Blog relacionado

¿Cómo juzgar la calidad de un torno de CNC?
¿Debe ajustarse la precisión de un torno de CNC?
¿Qué accesorios senecesitan para un torno de CNC?
¿Es difícil operar un torno de CNC?
¿Cuáles son las características de la tecnología CNC Lathe?

