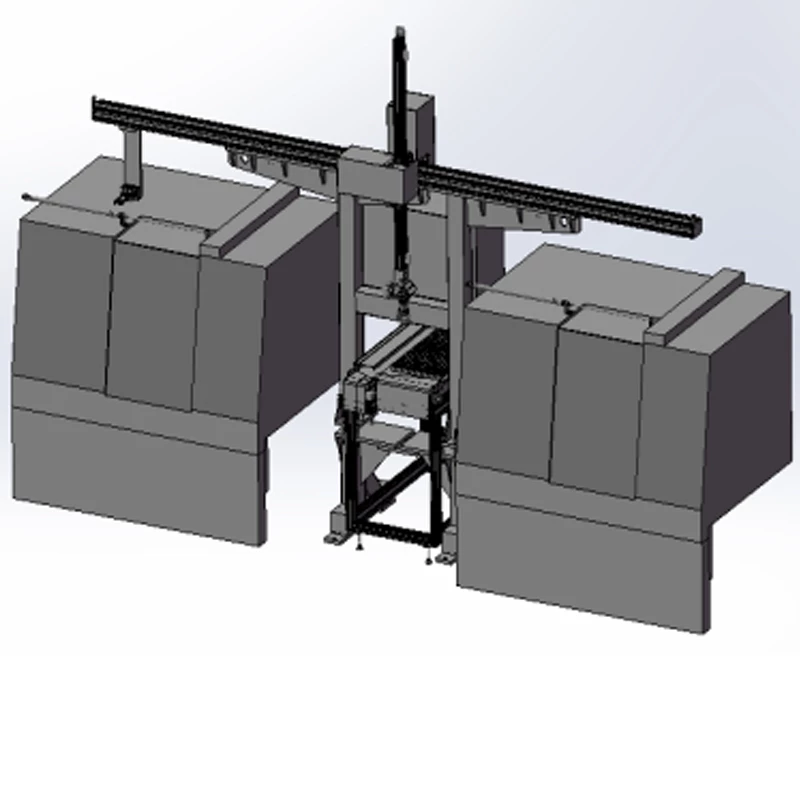
Unul pentru două manipulatoare de truss
|
Parametri de bază ai unuia pentru Două manipulatoare de trunchi |
||||
|
SCOPE DE APLICARE |
Piesa de lucru de tip disc, tip arbore. |
|||
|
Reîncărcare alerga-afară |
6 secunde (Cabla de sârmă 3m / s) |
Total o singură bucată alerga-afară |
Produs Timp de tăiere + 6 secunde |
|
|
Mod de acționare de stocare |
Reglarea vitezei Motor Drive |
Mod de locație |
Senzorul detectează poziționarea |
|
|
Precizia poziționării piesei de lucru |
±0,03 |
Sistem de control |
Intern/Wistron/Import/ Hust |
|
|
Depozit de materiale cu centură de transport |
Viteza de reglare a motorului, angrenajului, lanțului, benzii transportoare, tamburului, profilului de aluminiu |
|||
|
PRODUÎnlocuirea CT trebuie să schimbe partea |
Reglarea mecanismului limită a hambarului și gheara de mână |
|||
|
C.haracteristic |
O singură manipulator de remorcare + Strung CNC + Coșul dublu transportor, adaptați -vă la lungimea mai mică de 50 rotunde tulpină tip și placă pRoductS, două strunguri Procesarea în același timp, îmbunătățesc eficiența. |
|||
|
Condiții electricenecesare |
Sursă de alimentare: 3-Faza a patra-sârmă 380V; Gama de fluctuație a tensiunii: ± 10%; Frecvență: 50 Hz; gPe măsură ce sursa estenecesară: 0,6 MPa. |
|||
|
Pe-Cerințe de mediu ale site -ului |
Temperatura ambiantă: -10~50°C; Umiditate relativă: 20%~75%; Vibrație: accelerație de vibrație <0.5g; electrical cabinet must be grounded, grounding resistance<1; Fără gaze corozive la Loc de lucru; Fundația atelierului: Tratamentul convențional al podelei de ciment. |
|||
Anterior: Punct-manipulator integrat de matrice integrat
Următorul: Mașina tăiată a supapei motorului
produse asemanatoare
Blog înrudit

Cum să judecați calitatea unui strung CNC?
Trebuie ajustată precizia unui strung CNC?
Ce accesorii suntnecesare pentru un strung CNC?
Este dificil să operezi un strung CNC?
Care sunt caracteristicile tehnologiei de strung CNC?

