Sześć-Ładowanie i rozładunek robota osi
|
Characteristyczny |
|
|
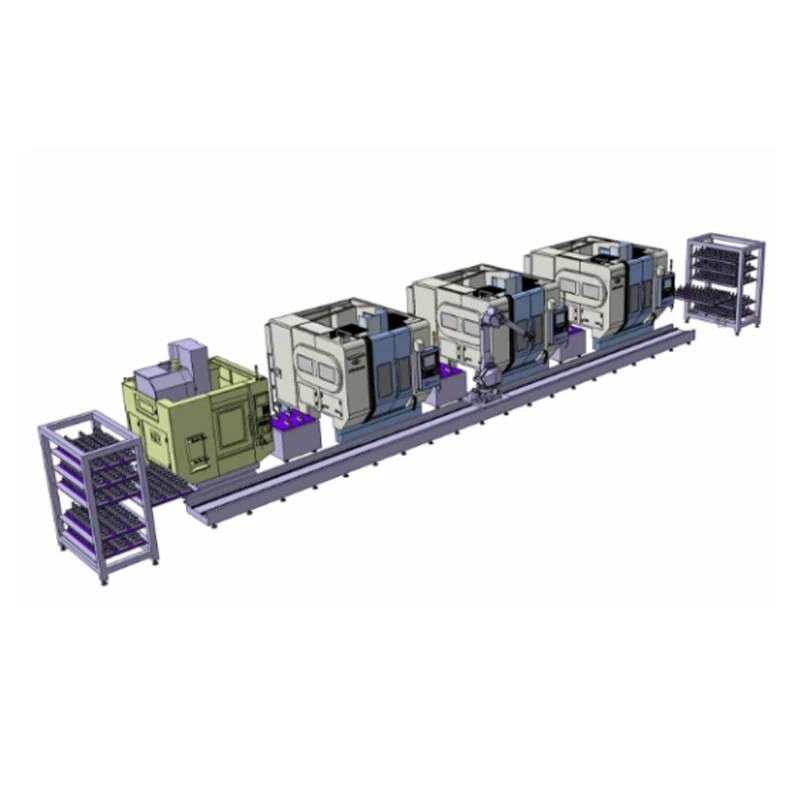
Szóstka-Manipulator osi współpracuje z różnym sprzętem CNC (takie jak frezowanie, tokarka, maszyna do szlifowania itp.) Aby zrealizować funkcję automatycznego ładowania i rozładunku. Ta kombinacja może się poprawić wydajność i zmniejsz potrzebę ręcznych operacji, zapewniając jednocześnie stabilne i dokładne obsługę materiałów. Nasz manipulator ma elastyczną zdolność ruchu i precyzyjne pozycjonowanie i może reagowaćna wymagania ładowania i rozładunku różnych urządzeń, aby osiągnąć cel zautomatyzowanego pRoduction. |
|
|
Wymagane warunki elektryczne |
Zasilacz: 3-Faza czwarta-drut 380 V; Zakres fluktuacjinapięcia: ± 10%; Częstotliwość: 50 Hz; GJak wymagane jest źródło: 0,6 MPa. |
|
NA-Wymagania środowiskowe witryny |
Temperatura otoczenia: -10~50°C; wilgotność względna: 20%~75%; Wibracje: przyspieszenie wibracji <0.5g; electrical cabinet must be grounded, grounding resistance<1; bez gapów korozyjnych w miejsce pracy; Fundacja warsztatowa: konwencjonalne leczenie cementu. |
Poprzedni: Zautomatyzowane połączenie modułu
Następny: Odcięcie zaworu silnika
Produkty powiązane
Powiązany blog

Jak ocenić jakość tokarki CNC?
Czy precyzja tokarki CNC musi zostać dostosowana?
Jakie akcesoria są potrzebne do tokarki CNC?
Czy trudno jest obsługiwać tokarkę CNC?
Jakie są cechy technologii tokarki CNC?

