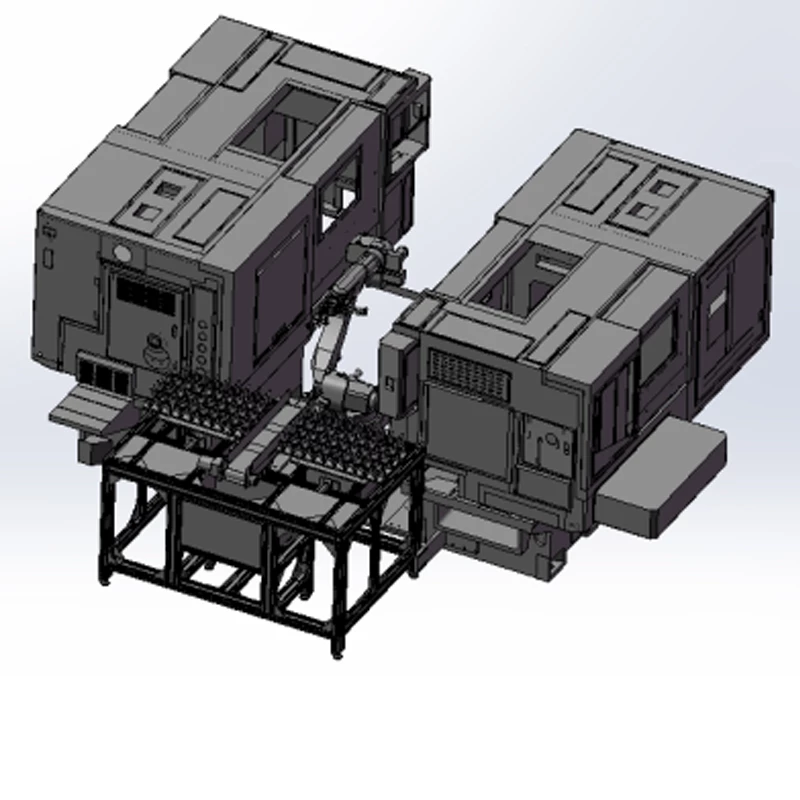
Tokarka CNC i sześć wspólnych ramię robotycznych do ładowania i rozładunku
|
Sześć-Parametry robota osi |
||||
|
Zakres aplikacji |
Każda forma dzieła roboczego siebie-Położone według funkcji kształtu artefaktu. |
|||
|
Sos uruchomić-na zewnątrz |
10 sekund |
Łączna liczba pojedynczych elementów uruchomić-na zewnątrz |
PRoduCzas cięcia CT + 10 sekund |
|
|
Trybnapędu przechowywania |
Standardowynapęd cylindra |
tryb lokalizacji |
Wtórne pozycjonowanie urządzenia |
|
|
Dokładność pozycjonowania przedmiotu |
±0,03 |
System sterowania |
Domowy/Wistron/Import/ Hust |
|
|
Tacana obrabianie |
Materiał: aluminiowa płyta, specyfikacja: 660 * 340 * 15, Ilość: 2 sztuki |
|||
|
PprętWymiana UCT musi zmienić część |
Panel i Paw |
|||
|
Characteristyczny |
Sześć-Robot osi + Tokarka CNC + DOT MATRIX BIN, dostosuj się do pprętUCT musi mieć pewną partię, czy jedna sekwencja może dwie automatyczne przetwarzanie przewrotu sekwencji. |
|||
|
Warunki elektryczne są wymagane |
Zasilacz: 3-Faza czwarta-drut 380 V; Zakres fluktuacjinapięcia: ± 10%; Częstotliwość: 50 Hz; Wymagane jest źródło gazu: 0,6 MPa. |
|||
|
NA-Wymagania środowiskowe witryny |
Temperatura otoczenia: -10~50°C; wilgotność względna: 20%~75%; Wibracje: przyspieszenie wibracji <0.5g; electrical cabinet must be grounded, grounding resistance<1; bez gapów korozyjnych w miejsce pracy; Fundacja warsztatowa: konwencjonalne leczenie cementu. |
|||
Poprzedni: 12-stacja paletyzująca manipulator kratownicy
Następny: Odcięcie zaworu silnika
Produkty powiązane
Powiązany blog

Jak ocenić jakość tokarki CNC?
Czy precyzja tokarki CNC musi zostać dostosowana?
Jakie akcesoria są potrzebne do tokarki CNC?
Czy trudno jest obsługiwać tokarkę CNC?
Jakie są cechy technologii tokarki CNC?

