|
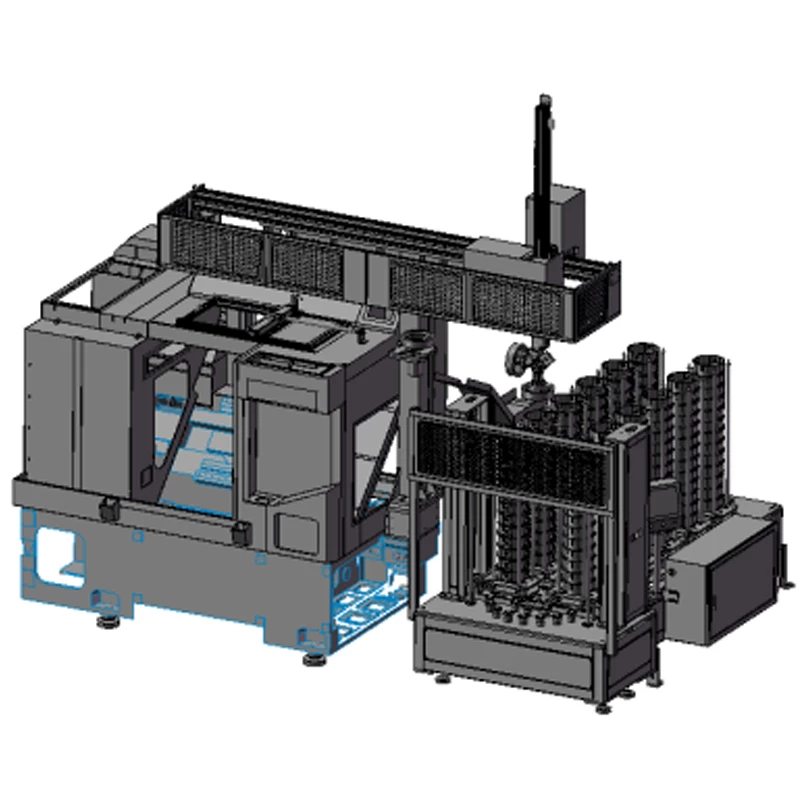
12 ขพารามิเตอร์ ASIC ของเครื่องม้วนโครงสำหรับสถานีพาเลท |
||||
|
Sรับมือกับแอปพลิเคชัน |
รูปแบบของงานชิ้นงานใด ๆ-ตั้งอยู่โดยคุณสมบัติรูปร่างของสิ่งประดิษฐ์ |
|||
|
การบรรจุใหม่ วิ่ง-ออก |
6 วินาที (สายรัดลวด 3M / S) |
ผลรวมชิ้นเดียว วิ่ง-ออก |
PRoduเวลาตัด CT + 6 วินาที |
|
|
โหมดไดรฟ์จัดเก็บข้อมูล |
เซอร์โวมอเตอร์ไดรฟ์ |
lโหมด ocation |
อุปกรณ์วางตำแหน่งรอง |
|
|
ความแม่นยำในการวางตำแหน่งงาน |
±0.03 |
ระบบควบคุม |
ภายในประเทศ/Wistron/ฉันmport/ เร่งรีบ |
|
|
ถาดชิ้นงาน |
โซ่, ตำแหน่งดิสก์, บอล การแบก |
|||
|
Pลำต้นการเปลี่ยน UCT จำเป็นต้องเปลี่ยนชิ้นส่วน |
วางตำแหน่งแผ่นดิสก์และอุ้งเท้า |
|||
|
Cเกี่ยวกับการขนานนาม |
Tการเคลื่อนไหวของเขาแข็งแกร่งมาก การบูรณาการของหุ่นยนต์และเครื่องกลึงซีเอ็นซี ทำให้มัน ปรับให้เข้ากับเครื่องใหม่ และ สามารถประมวลผลได้อย่างยืดหยุ่น หลังจาก Rการจัดสรรและการกระจัด- |
|||
|
จำเป็นต้องมีเงื่อนไขไฟฟ้า |
แหล่งจ่ายไฟ: 3-ขั้นตอนที่สี่-ลวด 380V; ช่วงความผันผวนของแรงดันไฟฟ้า: ± 10%- ความถี่: 50 Hz; จำเป็นต้องมีแหล่งก๊าซ: 0.6 MPa |
|||
|
บน-ข้อกำหนดด้านสิ่งแวดล้อมของไซต์ |
อุณหภูมิแวดล้อม: -10~50°C; ความชื้นสัมพัทธ์: 20%~75%- การสั่นสะเทือน: การเร่งความเร็วการสั่นสะเทือน <0.5g; electrical cabinet must be grounded, grounding resistance<1; ไม่มีก๊าซกัดกร่อนที่ ไซต์งาน; มูลนิธิเวิร์กช็อป: การรักษาพื้นปูนซีเมนต์ทั่วไป |
|||
ก่อนหน้า: 6-เครื่องดัดแปลงมัดแท่นวางพาเลท
ต่อไป: เครื่องยนต์วาล์วตัดเครื่อง
สินค้าที่เกี่ยวข้อง
บล็อกที่เกี่ยวข้อง

จะตัดสินคุณภาพของเครื่องกลึง CNC ได้อย่างไร?
จำเป็นต้องปรับความแม่นยำของเครื่องกลึงซีเอ็นซีหรือไม่?
อุปกรณ์เสริมใดที่จำเป็นสำหรับเครื่องกลึงซีเอ็นซี?
การใช้เครื่องกลึงซีเอ็นซียากหรือไม่?
อะไรคือลักษณะของเทคโนโลยีเครื่องกลึง CNC?

