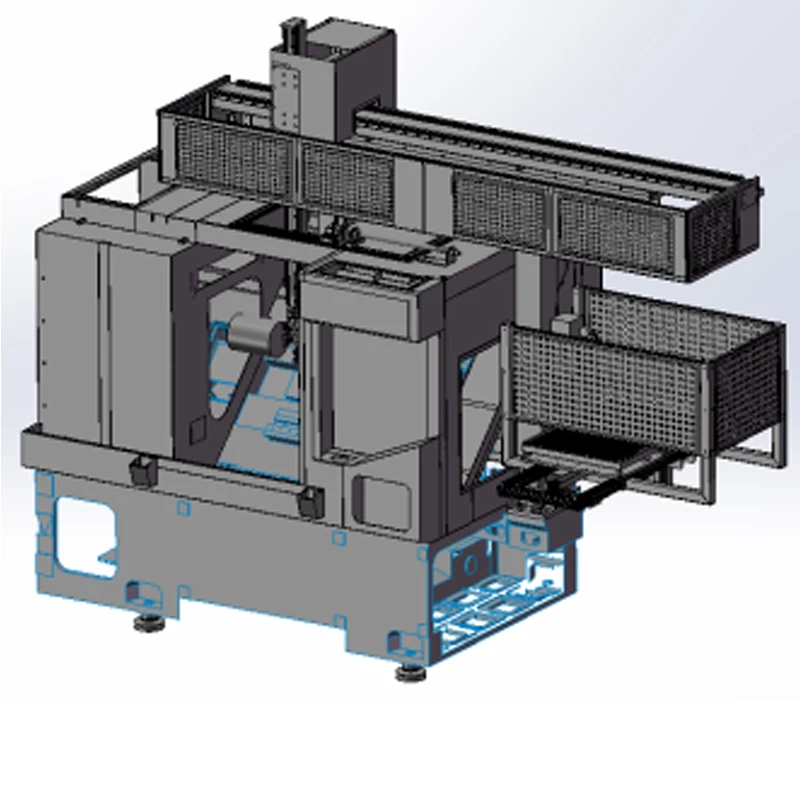
Ponto-Manipulador de treliça integrado da matriz
|
Parâmetros básicos do ponto-Manipulador de treliça integrado da matriz |
||||
|
SCOPE DE APLICAÇÃO |
Qualquer forma de peça de trabalho-Localizado por recursos de forma de artefato. |
|||
|
O curativo correr-fora |
6 segundos (arnês de fio 3m / s) |
Total de peça única correr-fora |
PhasteTempo de corte de UCT + 6 segundos |
|
|
Modo de unidade de armazenamento |
Servo acionamento de motor |
LModo de oculação |
Auto-posicionamento do servo-placa de material |
|
|
Precisão do posicionamento da peça de trabalho |
±0,03 |
Sistema de controle |
Doméstico/Wistron/EUmport/ Hust |
|
|
TRA da peça de trabalhoy |
Material: Placa de alumínio, Especificação: 690 * 470 * 30, quantidade: 1 peça |
|||
|
PhasteA substituição da UCT precisa alterar a peça |
Painel e Paw |
|||
|
Characterístico |
TA mobilidade é muito forte. Integração do manipulador e torno CNC faz isso adaptar -se ànova máquina e pode ser processamento flexível depois relocação e deslocamento. |
|||
|
Condições elétricasnecessárias |
Fonte de alimentação: 3-Fase Quatro-fio 380V; Faixa de flutuação de tensão: ± 10%; Frequência: 50 Hz; gconforme a fonte énecessária: 0,6 MPa. |
|||
|
Sobre-Requisitos ambientais do local |
Temperatura ambiente: -10~50°C; umidade relativa: 20%~75%; Vibração: aceleração de vibração <0.5g; electrical cabinet must be grounded, grounding resistance<1; Sem gases corrosivosno local de trabalho; Fundação do Workshop: Tratamento convencional de piso de cimento. |
|||
Anterior: UM-Modelo de usinagem de pórtica aérea da série
Próximo: Máquina de corte de válvula do motor
produtos relacionados
Blog relacionado

Como julgar a qualidade de um torno CNC?
A precisão de um torno CNC precisa ser ajustada?
Quais acessórios sãonecessários para um torno CNC?
É difícil operar um torno CNC?
Quais são as características da tecnologia CNC torno?

