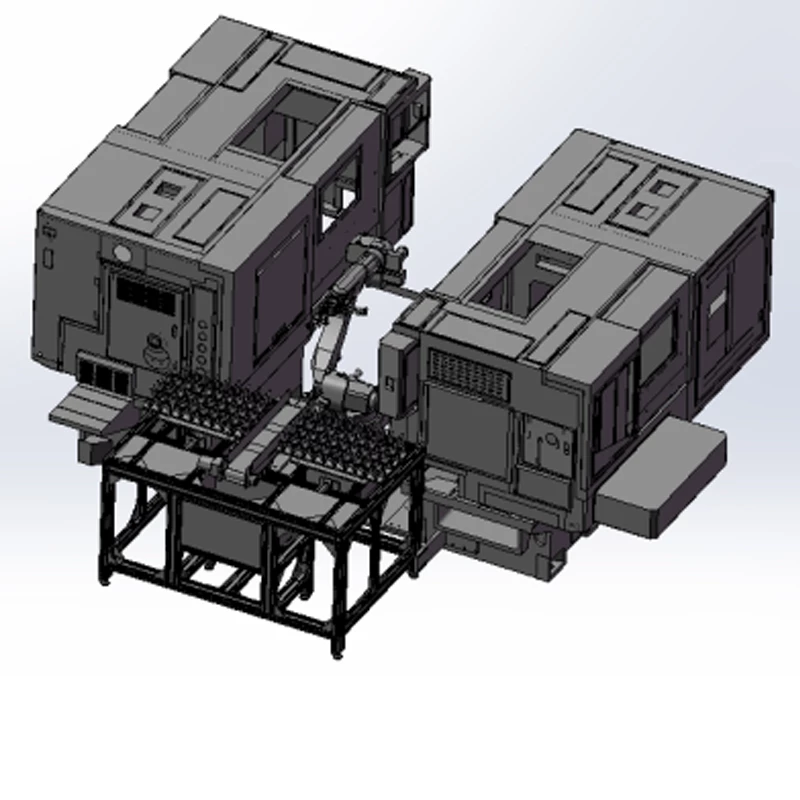
CNC draaibank en zes gezamenlijke robotarm voor laden en lossen
|
Zes-Axis Robot -parameters |
||||
|
Toepassingscapaciteit |
Elke vorm van werkstuk zelf-Gelegen op artefactvormkenmerken. |
|||
|
De dressing loop-uit |
10 seconden |
Enkel stuk totaal loop-uit |
PRoduCT snijtijd + 10 seconden |
|
|
Opslagaandrijfmodus |
Standaardcilinderaandrijving |
Locatiemodus |
Secundaire positioneringspositionering |
|
|
Werkstuk Positionering Nauwkeurigheid |
±0,03 |
Besturingssysteem |
Huiselijk/Wiston/Import/ Hust |
|
|
Werkstuklade |
Materiaal: aluminium plaat, specificatie: 660 * 340 * 15, hoeveelheid: 2 stuks |
|||
|
PhengelUCT -vervanging moet van het onderdeel veranderen |
Paneel en poot |
|||
|
Characteristisch |
Zes-asrobot + CNC draaibank + Dot Matrix Bin, pas aan aan de PhengelUCT moet een bepaalde batch hebben, kan één volgorde twee sequentie automatische draaisraadverwerking. |
|||
|
Elektrische omstandigheden zijn vereist |
Voeding: 3-Fase vier-draad 380V; Spanningsschommelingenbereik: ± 10%; Frequentie: 50 Hz; Gasbron is vereist: 0,6 MPa. |
|||
|
Op-milieu -eisen van de site |
Omgevingstemperatuur: -10~50°C; Relatieve vochtigheid: 20%~75%; Vibratie: trillingsversnelling <0.5g; electrical cabinet must be grounded, grounding resistance<1; Geen corrosieve gassen bij de Werksite; Workshop Foundation: conventionele cement vloerbehandeling. |
|||
Vorig: 12-Station Palletizing Truss Manipulator
Volgende: Motorklep afgesneden machine
gerelateerde producten
Gerelateerde blog

Hoe de kwaliteit van een CNC -draaibank te beoordelen?
Moet de precisie van een CNC -draaibank worden aangepast?
Welke accessoires zijnnodig voor een CNC -draaibank?
Is het moeilijk om een CNC -draaibank te bedienen?
Wat zijn de kenmerken van CNC -draaibanktechnologie?

