제품 세부 정보
|
육-축 로봇 매개 변수 |
||||
|
응용 프로그램의 범위 |
모든 형태의 작업 조각 자체-아티팩트 모양 기능으로 위치합니다. |
|||
|
드레싱 달리다-밖으로 |
10 초 |
단일 조각 총 달리다-밖으로 |
피로두CT 절단 시간 + 10 초 |
|
|
스토리지 드라이브 모드 |
표준 실린더 드라이브 |
위치 모드 |
보조 포지셔닝 장치 위치 |
|
|
공작물 포지셔닝 정확도 |
±0.03 |
제어 시스템 |
국내의/Wistron/나MPORT/ 가슴 |
|
|
공작물 트레이 |
재료 : 알루미늄 플레이트, 사양 : 660 * 340 * 15, 수량 : 2 조각 |
|||
|
피막대UCT 교체는 부품을 변경해야합니다 |
패널과 발 |
|||
|
기음Haracteristic |
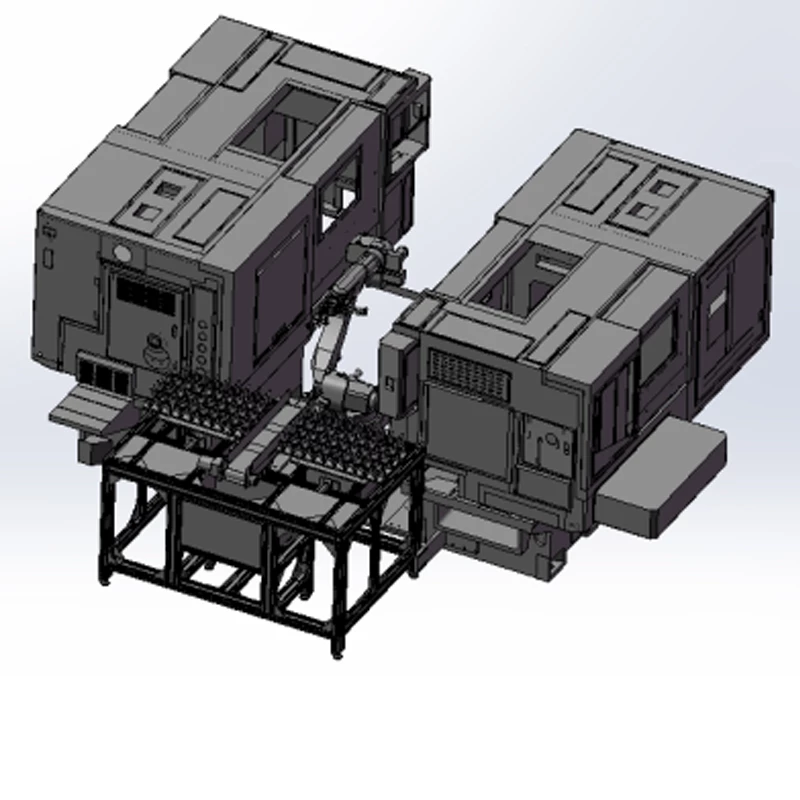
육-축 로봇 + CNC 선반 + 도트 매트릭스 빈, p에 적응합니다막대UCT에는 특정 배치가 있어야합니다. 하나의 시퀀스 2 시퀀스 자동 회전 와이어 처리를 할 수 있습니다. |
|||
|
전기 조건이 필요합니다 |
전원 공급 장치 : 3-4 단계-와이어 380V; 전압 변동 범위 : ± 10%; 주파수 : 50Hz; 가스 공급원이 필요합니다 : 0.6 MPa. |
|||
|
~에-사이트 환경 요구 사항 |
주변 온도 : -10~50°기음; 상대 습도 : 20%~75%; 진동 : 진동 가속 <0.5g; electrical cabinet must be grounded, grounding resistance<1; 부식성 가스가 없습니다 작업장; 워크숍 재단 : 기존 시멘트 바닥 처리. |
|||
이전의: 12-스테이션 팔레팅 트러스 조작기
다음: 엔진 밸브는 기계를 차단합니다
관련 상품
관련 블로그


