製品詳細
|
六-軸ロボットパラメーター |
||||
|
アプリケーションの範囲 |
あらゆる形のワークピースセルフ-アーティファクトシェイプ機能によって配置されています。 |
|||
|
ドレッシング 走る-外 |
10秒 |
シングルピース合計 走る-外 |
pロドゥCT切断時間 + 10秒 |
|
|
ストレージドライブモード |
標準シリンダードライブ |
ロケーションモード |
二次的な位置決めデバイスの位置決め |
|
|
ワークポジショニングの精度 |
±0.03 |
制御システム |
国内/ウェストロン/私mport/ ハスト |
|
|
ワークトレイ |
材料:アルミニウムプレート、仕様:660 * 340 * 15、数量:2個 |
|||
|
pロッドUCTの交換はパーツを変更する必要があります |
パネルと足 |
|||
|
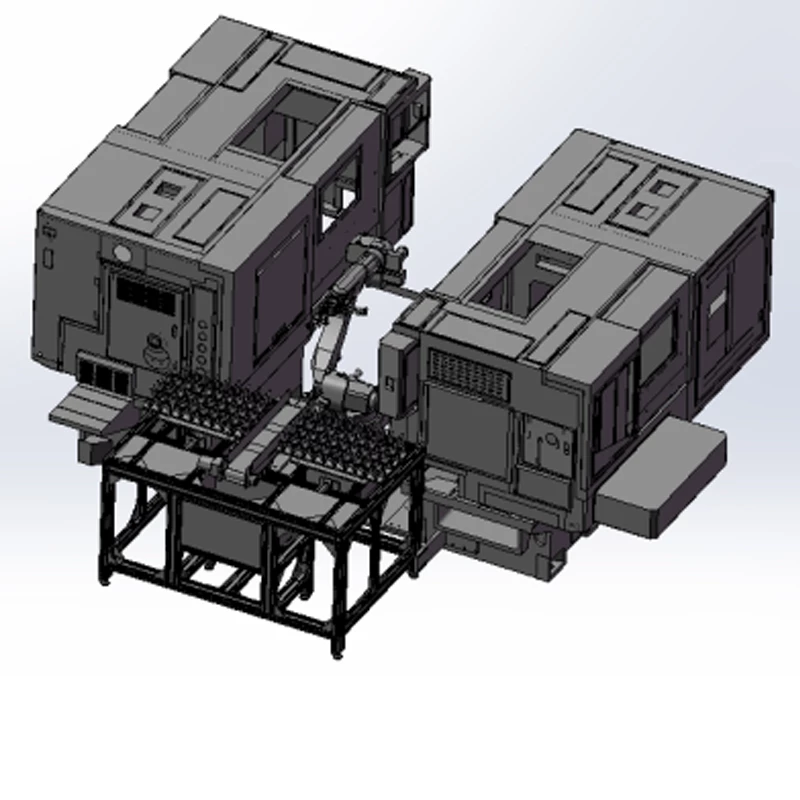
c病気 |
六-軸ロボット + CNC旋盤 + ドットマトリックスビン、pに適応しますロッドUCTには特定のバッチが必要で、1つのシーケンス2シーケンス自動ターンワイヤ処理ができます。 |
|||
|
電気的条件が必要です |
電源:3-フェーズ4-ワイヤ380V;電圧変動範囲: ± 10%;周波数:50 Hz; ガス源が必要です:0.6 MPa。 |
|||
|
の上-サイト環境要件 |
周囲温度: -10~50°c;相対湿度:20%~75%;振動:振動加速 <0.5g; electrical cabinet must be grounded, grounding resistance<1; に腐食性ガスはありません 作業サイト; ワークショップ財団:従来のセメントフロアトリートメント。 |
|||
関連製品
関連ブログ


