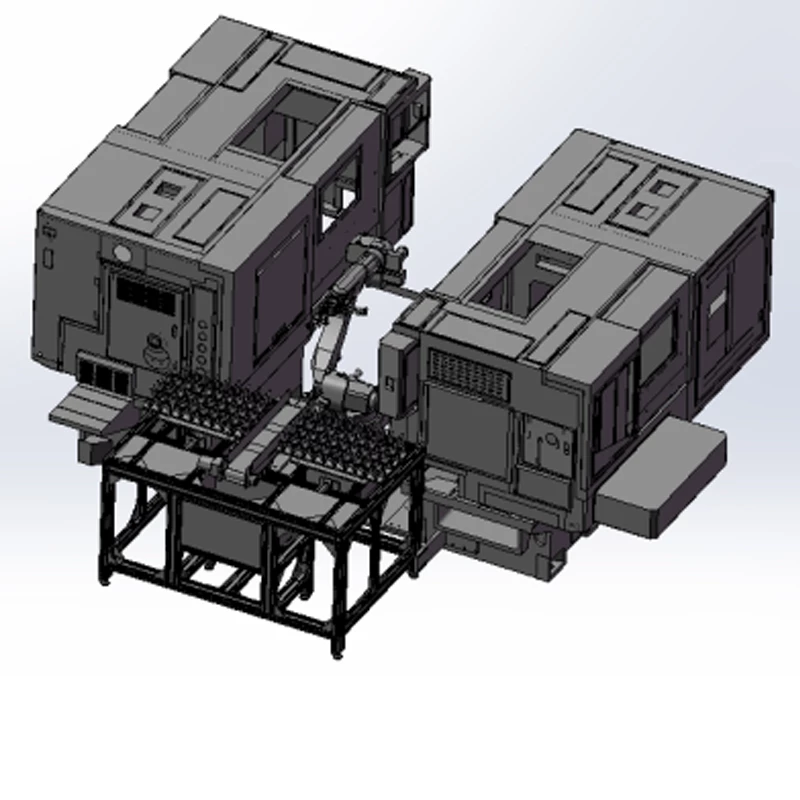
Tornio CNC e sei braccio robotico articolare per il caricamento e lo scarico
|
Sei-Parametri robot assi |
||||
|
Ambito di applicazione |
Qualsiasi forma di lavoro di lavoro-Situato con caratteristiche a forma di artefatto. |
|||
|
Il condimento correre-fuori |
10 secondi |
Totale singolo correre-fuori |
PRoduTempo di taglio CT + 10 secondi |
|
|
Modalità di trasmissione di archiviazione |
Cilindro standard |
Modalità di posizione |
Posizionamento del dispositivo di posizionamento secondario |
|
|
Accuratezza del posizionamento del pezzo |
±0,03 |
Sistema di controllo |
Domestico/Wistron/IOMport/ Hust |
|
|
Vassoio del pezzo |
Materiale: piastra di alluminio, specifica: 660 * 340 * 15, quantità: 2 pezzi |
|||
|
PastaLa sostituzione UCT deve cambiare la parte |
Pannello e zampa |
|||
|
Characteristico |
Sei-robot asse + Tornio CNC + DOT matrice cestino, adattarsi a pastaUCT deve avere un determinato batch, può una sequenza di due sequenze di elaborazione automatica del filo. |
|||
|
Sono richieste condizioni elettriche |
Alimentazione: 3-Fase quattro-filo 380 V; gamma di fluttuazione della tensione: ± 10%; Frequenza: 50 Hz; È richiesta una fonte di gas: 0,6 MPa. |
|||
|
SU-Requisiti ambientali del sito |
Temperatura ambiente: -10~50°C; Umidità relativa: 20%~75%; Vibrazione: accelerazione delle vibrazioni <0.5g; electrical cabinet must be grounded, grounding resistance<1; Nessun gas corrosivo al sito di lavoro; Workshop Foundation: trattamento convenzionale per il pavimento del cemento. |
|||
Precedente: 12-Manipolatore a trava palletizzazione della stazione
Prossimo: Macchina di taglio valvola del motore
prodotti correlati
Blog correlato

Come giudicare la qualità di un tornio CNC?
La precisione di un tornio CNC deve essere regolata?
Quali accessori sononecessari per un tornio CNC?
È difficile far funzionare un tornio CNC?
Quali sono le caratteristiche della tecnologia del tornio CNC?

