

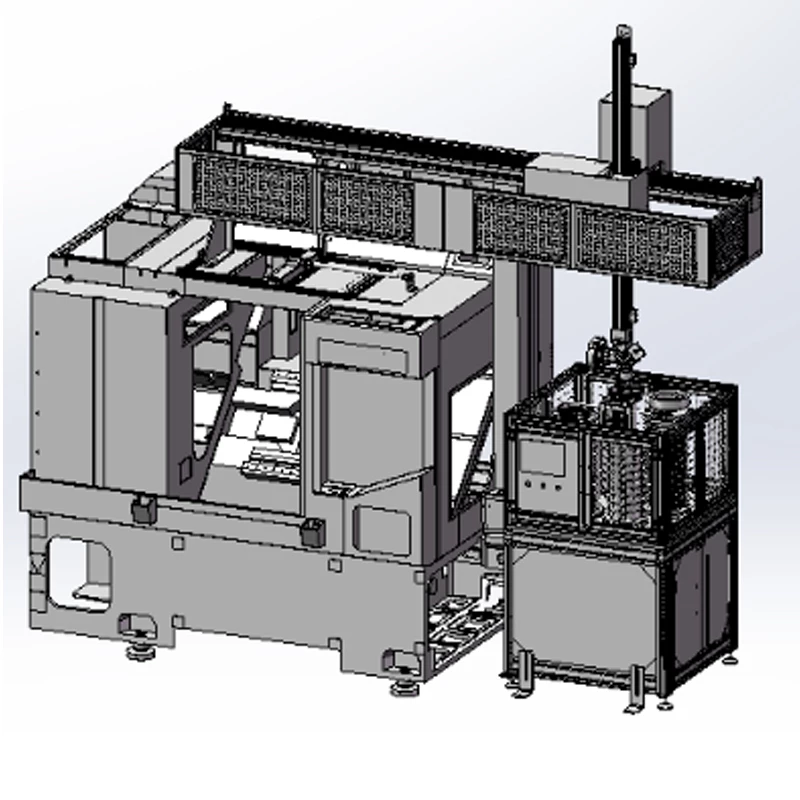
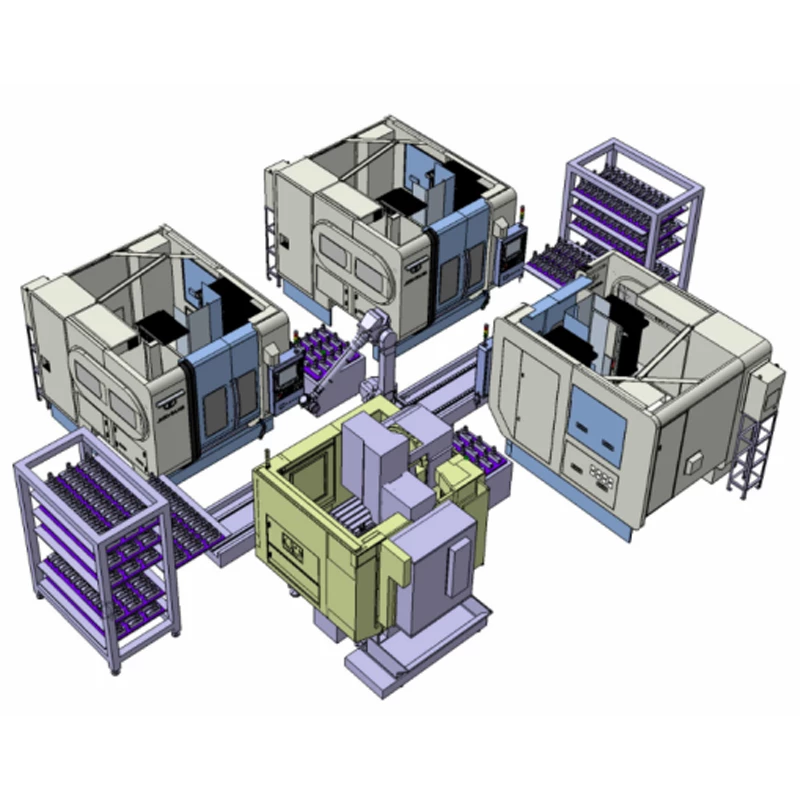
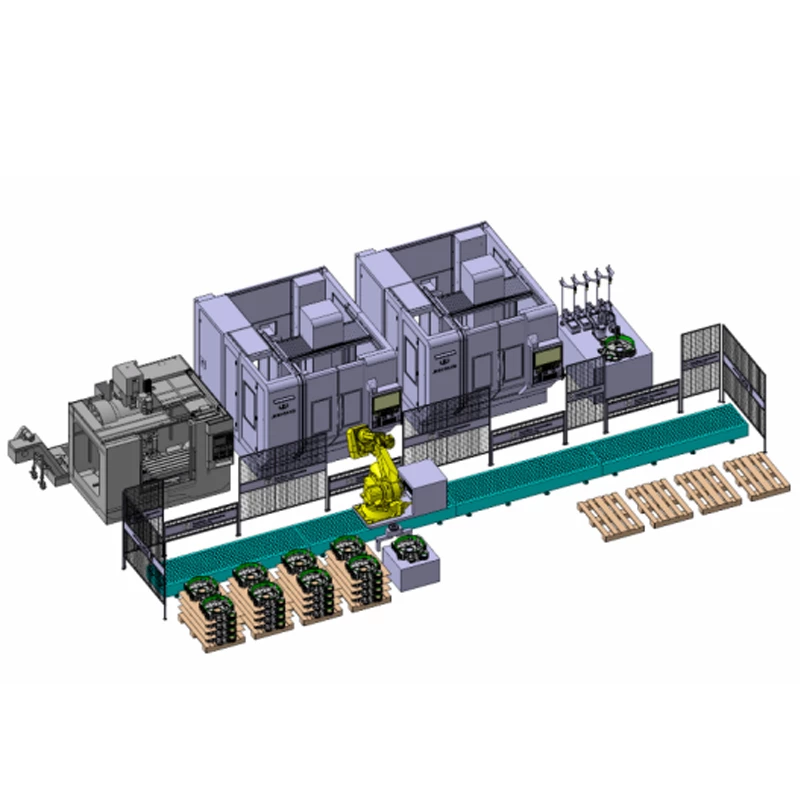
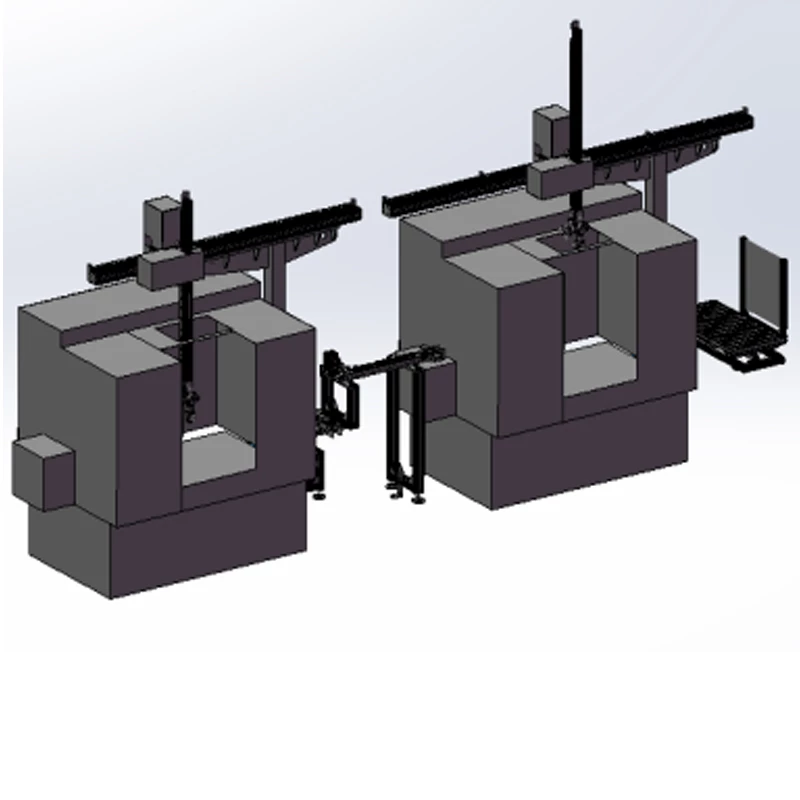
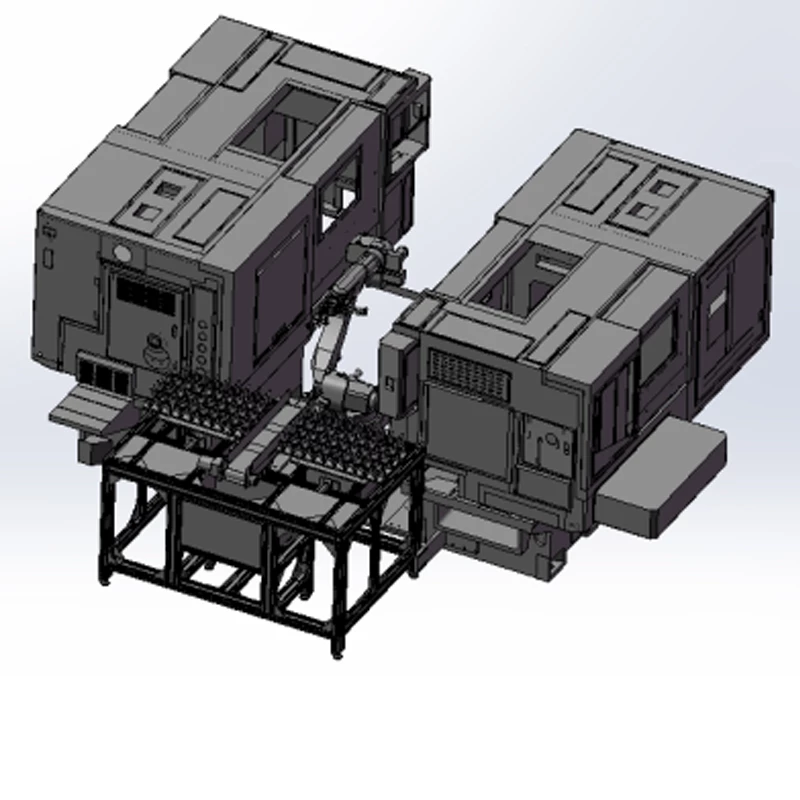
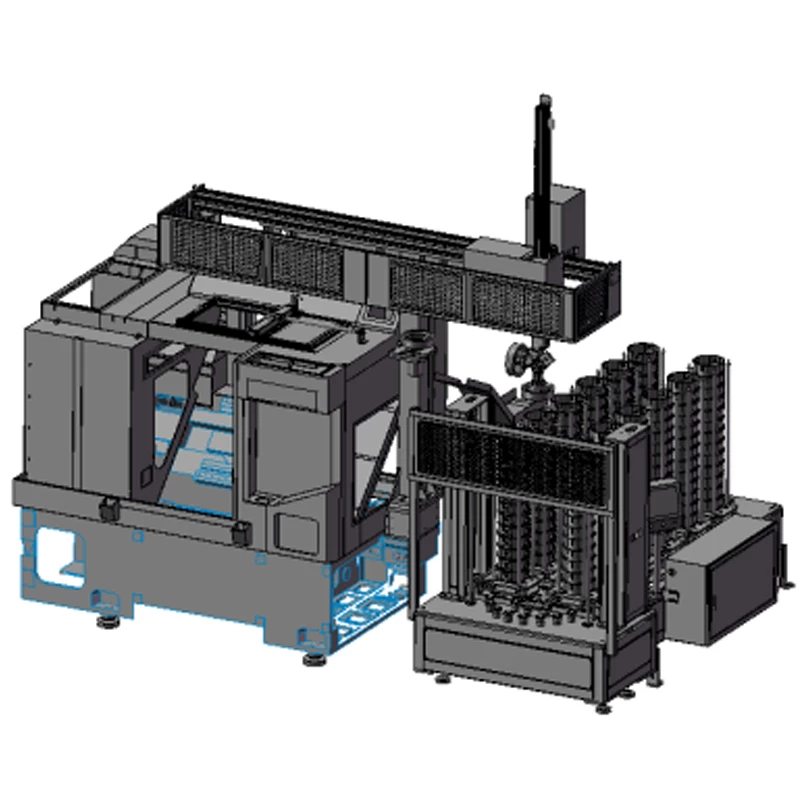
6-Stationspalettierungsträgermanipulator
|
6 BASIC -Parameter des Stationspalettierungs -Truss -Manipulators |
||||
|
SAnwendung umgehen |
Jede Form von Arbeitenstück selbst-befindet sich durch Artefaktformmerkmale. |
|||
|
Neuladen laufen-aus |
6 Sekunden (Kabelbaum 3m / S) |
Einzelstücks Gesamt laufen-aus |
PStangeUCT -Schneidzeit + 6 Sekunden |
|
|
Speicherantriebsmodus |
Servo -Motorantrieb |
Standortmodus |
Sekundärpositionierungsvorrichtung |
|
|
Werkstücksgenauigkeit |
±0,03 |
Steuerungssystem |
Inländisch/Wistron/ICHmport/ Hust |
|
|
CVorabstufe |
Kette, Positionierungsplatte, fließender Stange, Kugelkugel |
|||
|
PStängelDer UCT -Ersatz muss das Teil ändern |
Positionieren Sie Scheibe und Pfote |
|||
|
Charakteristisch |
TDie Mobilität ist sehr stark. Integration von Manipulator und CNC -Drehmaschine macht es sich an dieneue Maschine anpassen Und Kann eine flexible Verarbeitung sein nach RErweiterung und Verschiebung. |
|||
|
Erforderliche elektrische Bedingungen |
Stromversorgung: 3-Phase vier-Draht 380V; Spannungsschwankungsbereich: ± 10%; Frequenz: 50 Hz; Gals Quelle ist erforderlich: 0,6 MPa. |
|||
|
An-Standortumweltanforderungen |
Umgebungstemperatur: -10~50°C; Relative Luftfeuchtigkeit: 20%~75%; Vibration: Vibrationsbeschleunigung <0.5g; electrical cabinet must be grounded, grounding resistance<1; Keine ätzenden Gase am Baustelle; Workshop Foundation: Konventionelle Zementbodenbehandlung. |
|||
Anfrage
Vorherige: Eins für zwei Fachwerkmanipulatoren
Nächste: Mittellose Schleifmaschine
Verwandte Produkte
Verwandter Blog

Wie beurteilen Sie die Qualität einer CNC -Drehmaschine?

Muss die Präzision einer CNC -Drehmaschine angepasst werden?

Welches Zubehör werden für eine CNC -Drehmaschine benötigt?
Ist es schwierig, eine CNC -Drehmaschine zu betreiben?

Was sind die Merkmale der CNC -Drehsteuertechnologie?






