|
ستة-معلمات روبوت المحور |
||||
|
نطاق التطبيق |
أي شكل من أشكال العمل الذاتي-تقع بواسطة ميزات شكل قطعة أثرية. |
|||
|
ارتداء الملابس يجري-خارج |
10 ثوان |
قطعة واحدة المجموع يجري-خارج |
صرودوCT وقت القطع + 10 ثوان |
|
|
وضع محرك التخزين |
محرك الأسطوانة القياسية |
وضع الموقع |
وضع جهاز تحديد المواقع الثانوي |
|
|
دقة تحديد موقع الشغل |
±0.03 |
نظام التحكم |
محلي/ويسترون/أناmport/ صاخبة |
|
|
صينية الشغل |
المادة: لوحة الألومنيوم ، المواصفات: 660 * 340 * 15 ، الكمية: 2 قطعة |
|||
|
صعصايحتاج استبدال UCT إلى تغيير الجزء |
لوحة ومخلب |
|||
|
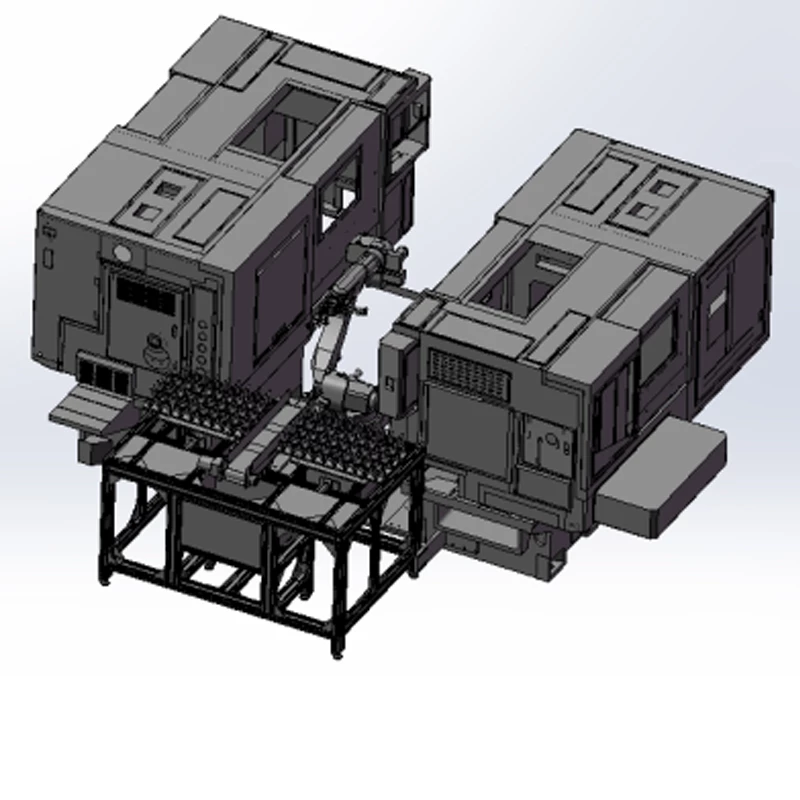
جHaracteristic |
ستة-روبوت المحور + مخرطة CNC + Dot Matrix Bin ، التكيف مع P.عصاتحتاج UCT إلى الحصول على دفعة معينة ، هل يمكن لسلسلة اثنين تسلسل تلقائي معالجة الأسلاك الدوران. |
|||
|
الظروف الكهربائية مطلوبة |
إمدادات الطاقة: 3-المرحلة الرابعة-سلك 380V ؛ نطاق تقلب الجهد: ± 10%؛ التردد: 50 هرتز ؛ مصدر الغاز مطلوب: 0.6 ميجا باسكال. |
|||
|
على-الموقع المتطلبات البيئية |
درجة الحرارة المحيطة: -10~50°ج. الرطوبة النسبية: 20%~75%؛ الاهتزاز: تسارع الاهتزاز <0.5g; electrical cabinet must be grounded, grounding resistance<1 ؛ لا غازات تآكل في موقع العمل ؛ مؤسسة ورشة العمل: علاج أرضية الأسمنت التقليدية. |
|||
سابق: 12-المحطة المنطقية الجمالون
التالي: قطع صمام المحرك من آلة
منتجات ذات صله
مدونة ذات صلة

كيف تحكم على جودة مخرطة CNC؟
هل تحتاج دقة مخرطة CNC إلى تعديلها؟
ما هي الملحقات اللازمة لمخرطة CNC؟
ما هي خصائص تكنولوجيا مخرطة CNC؟

